
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - AI模型在线查看 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割 - 3D道路快速建模
这是“激光雷达入门”文章的延续。 在这篇文章中,我们将查看用于处理点云的 python 库和 Open3D 数据结构,执行可视化并操作点云数据,以便进行后续的分析处理。
如果你需要快速预览3D点云,或者将PCD点云转化为其他格式,那么更简单的方法是使用NSDT 3DConvert这个强大的在线工具,它支持数十种3D格式文件的在线预览和转化,而且无需本地安装任何软件:

1、什么是点云数据?
参考我写的第一篇文章,激光雷达数据通常表示为点云,其中包含 n 个点,主要具有以下属性:
- X坐标
- Y坐标
- Z坐标
这些点还可能具有与每个点相对应的“强度”值,该值仅表示从激光雷达传感器等 3D 扫描仪发射后返回到传感器的光能量。
然而,值得注意的是,点云也可以从其他 3D 扫描仪和计算机辅助设计 (CAD) 模型生成。
2、可视化点云数据的工具
用于可视化激光雷达点云的工具有很多,例如以下软件和库:
- Point Cloud Library
- CloudCompare
- MeshLab
- MATLAB
- Autodesk Recap
- Open3D
本教程重点介绍用于可视化和探索 3D 数据结构的 Open3D,更重要的是点云数据。
3、Open3D 数据结构
Open3d 是一个开源的、支持使用 Python 和 C++ 开发处理 3D 数据(例如激光雷达)的软件包。有关 Open3D 的更多信息,可以访问此处的文档。
Open3D 处理不同的数据结构和点云数据,例如:
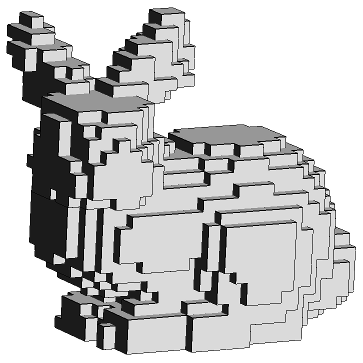
- 体素栅格
体素(Voxel)通常被描述为 2D 图像的三维像素,是体积像素的缩写。 体素网格由点云构成/派生,如下所示:
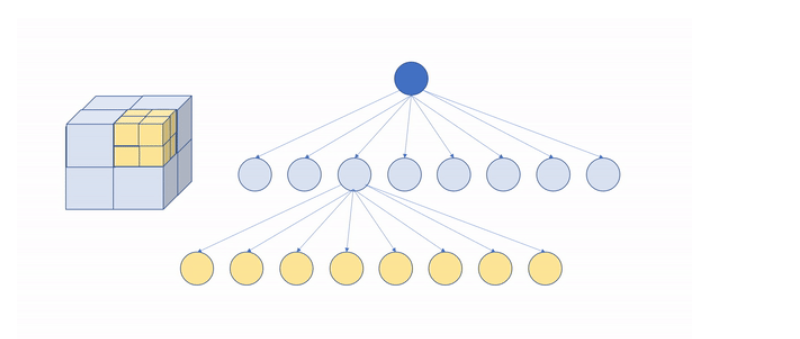
- 八叉树
八叉树是一种树形数据结构,其中每个内部节点有八个子节点。 八叉树可用于通过将三维空间细分为八个八分圆来划分三维空间。
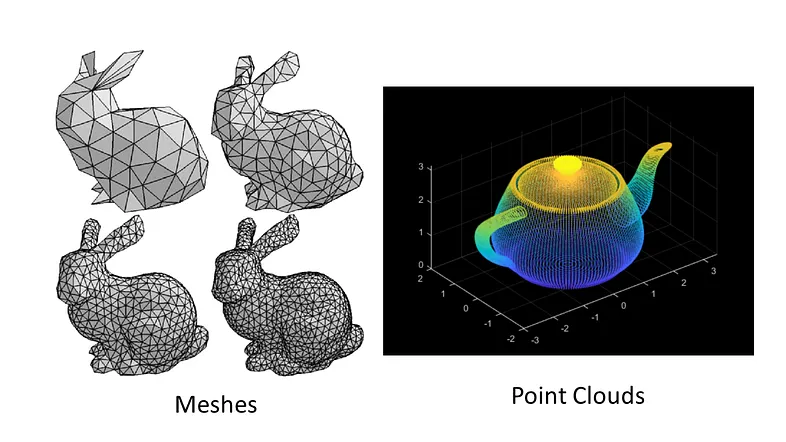
- 网格
在 3D 计算机图形学中,网格由定义对象形状的顶点、边和面组成。 有多边形网格和三角形网格。
- 点云数据
点云由数百万个地理参考点组成。
下面是网格和点云数据之间的比较图像:
- RGB 数据类和深度图像类
4、安装Open3D
为了清楚地了解点云是什么,让我们继续安装有助于处理数据的必要工具:
!pip install open3d
import numpy as np
import matplotlib.pyplot as plt
import open3d as o3d由于我们将处理 3 维数据,因此安装 numpy、matplotlib 和 open3d 始终是一个好主意。
5、处理不同的数据格式
查看 Open3D 数据集时,你会注意到存储 3D 数据的不同类型的文件格式,其中一些格式如下:
- 多边形文件格式 (PLY):简单地说,PLY 是一种用于将 3D 数据存储为多边形集合的文件格式。
让我们使用以下代码作为 PLY 格式的示例:
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
print(pcd)
print(np.asarray(pcd.points))
o3d.visualization.draw_plotly([pcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])首先,我们通过 ply_point_cloud = o3d.data.PLYPointCloud() 从 Open3D 创建 PLYPointCloud 类的实例。
然后使用Open3D提供的 read_point_cloud函数,我们将读取创建的实例的路径并将其存储到pcd变量中。 当我们打印的时候,输出的是点云的一些基本信息,比如点数、坐标范围等。
当我们使用 np.asarray 将 open3d 格式的数据转换为 numpy 数组时,生成的数组将包含云中每个点的 (X,Y,Z) 坐标。
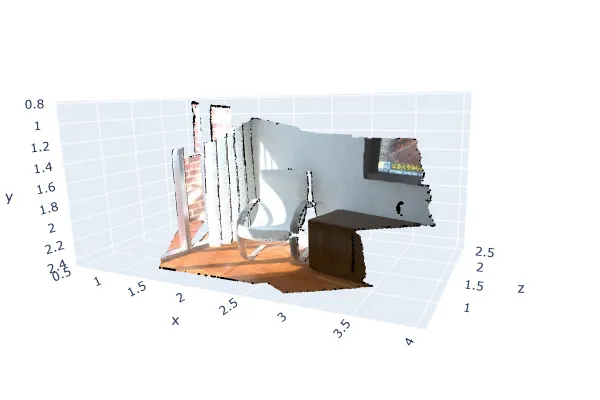
为了可视化点云,我们将使用 draw_plotly函数。 它接受多个参数:
- Zoom:镜头远近
- Camera Position:相机位置
- Up Vector:向上矢量
- 包含云点的 PCD 变量
结果如下:
- 点云数据(PCD)
PCD是一种用于存储和交换 3D 点云数据(我们在本文中感兴趣的主题)的文件格式。 此文件格式通常存储有关 (X,Y,Z) 坐标、强度和颜色的信息。
同样,让我们看一下点云中的可用数据集:
dataset = o3d.data.PCDPointCloud()
pcd = o3d.io.read_point_cloud(dataset.path)
print(pcd)
print(np.asarray(pcd.points))
o3d.visualization.draw_plotly([pcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])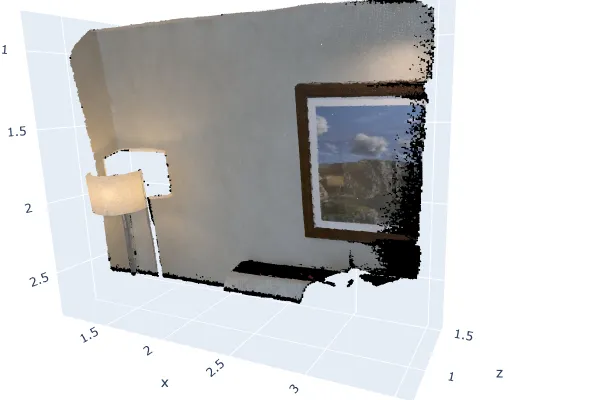
6、结束语
这是对点云以及不同格式点云的可视化的简单介绍,在下一个教程中,我们将仔细研究 Open3D 用于处理点云的其他有用功能,例如平面分割和应用 DBSCAN。
原文链接:Gentle Introduction to Point Clouds in Open3D
BimAnt翻译整理,转载请标明出处





